GPIO(General Purpose Input/Output)는 MCU가 외부 세계와 신호를 주고받는 가장 기본적인 수단이다.
이름 그대로 특정 기능에 고정되지 않고, 소프트웨어 설정에 따라 입력 또는 출력으로 사용할 수 있다.
크게 두 가지 역할이 있다.
- Input: 외부 신호(버튼, 센서 등)를 MCU가 읽어들임
- Output: MCU가 외부 장치(LED, 모터 드라이버 등)에 신호를 인가함
출력 모드: Push-Pull vs Open-Drain
Push-Pull
MCU가 핀을 High와 Low 모두 직접 drive하는 방식이다. 내부에 PMOS와 NMOS 트랜지스터가 한 쌍으로 연결되어 있어서, High 명령이 오면 PMOS가 켜져 핀을 VDD에 연결하고, Low 명령이 오면 NMOS가 켜져 핀을 GND에 연결한다.
외부 저항 없이도 원하는 레벨을 정확하게 출력할 수 있어서, 일반적인 LED 제어나 디지털 출력에 기본으로 사용한다.
Open-Drain
NMOS 하나만 사용하는 방식이다. Low는 직접 drive할 수 있지만, High는 스스로 만들지 못한다. 대신 핀을 그냥 놔버리는데(Hi-Z), 이때 외부에 연결된 Pull-up 저항이 핀을 High로 끌어올린다.

왜 Open-Drain을 사용할까?
대표적인 예가 I2C다. 여러 장치가 같은 버스 선 하나를 공유할 때, 누군가 Low를 당기면 버스 전체가 Low가 된다.
만약 Push-Pull이었다면 문제가 생긴다. 장치 A가 High를 output하는 동시에 장치 B가 Low를 output하면, VDD와 GND가 직접 연결되는 short가 발생하기 때문이다.
Open-Drain은 Pull-up 저항의 전압을 MCU VDD와 다르게 설정할 수도 있어서, 3.3V MCU와 5V 버스를 연결할 때도 별도 level shift 없이 쓸 수 있다.
입력 모드: Pull-up / Pull-down / Floating
버튼을 GPIO 입력으로 읽는다고 해보자. 버튼이 눌리지 않은 상태에서 핀이 아무 데도 연결되지 않으면 Floating 상태가 된다.
이 상태에서는 공중에 떠 있는 핀이 주변 noise를 그대로 받아들여서 IDR을 읽으면 0이 될지 1이 될지 예측할 수 없다.
그래서 평상시에 핀을 확실한 레벨로 고정해두는 것이 Pull-up / Pull-down이다.

| 설정 | 평상시 | 버튼 누를 때 |
|---|---|---|
| Pull-up | HIGH | LOW |
| Pull-down | LOW | HIGH |
STM32는 외부 저항 없이 내부 Pull-up / Pull-down을 PUPDR 레지스터로 설정할 수 있다.
이전 글에서 PC13 버튼을 읽을 때 Pull-up을 설정했던 것이 바로 이 이유다.
STM32 GPIO 내부 블록 다이어그램
STM32 레퍼런스 매뉴얼에는 GPIO 핀 하나의 구조를 보여주는 블록 다이어그램이 있다.
GPIO를 이해할 때 가장 중요한 그림 중 하나라서, 한 번 제대로 읽어두면 이후에 훨씬 덜 헷갈린다.
크게 세 부분으로 나눠서 볼 수 있다.
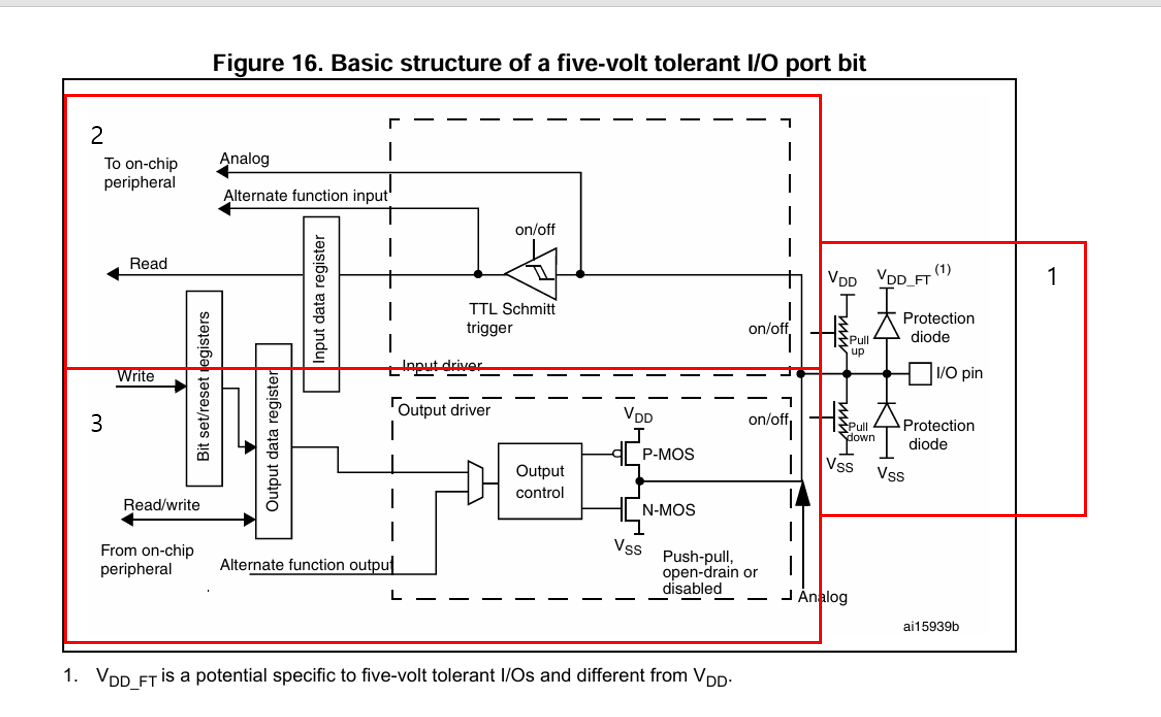
1) 실제 핀 (I/O Pin)
핀 양쪽에는 Protection Diode가 붙어 있다.
핀에 VDD보다 높거나 VSS보다 낮은 전압이 들어왔을 때 내부 회로를 보호하는 역할을 한다.
또한 Pull-up / Pull-down 저항이 스위치 형태로 표현되어 있는데, 이 스위치를 소프트웨어로 켜고 끄는 것이 PUPDR 레지스터다.
2) 입력 경로 (Input Driver)
핀 신호는 TTL Schmitt Trigger를 거쳐 Input Data Register(IDR) 로 들어간다.
Schmitt Trigger가 있는 이유는 noise 때문이다.
신호가 천천히 변하거나 noise가 섞여 있어도, hysteresis 특성을 통해 보다 명확하게 0과 1로 해석할 수 있다.
Analog 모드에서는 이 디지털 입력 경로 자체를 끄기도 한다.
즉, 펌웨어에서 입력을 읽는다는 것은 결국 IDR 값을 읽는 것이다.
3) 출력 경로 (Output Driver)
출력은 ODR(Output Data Register)에 값을 쓰거나, BSRR(Bit Set/Reset Register)를 통해 제어된다.
이 값이 Output Control을 거쳐 P-MOS / N-MOS 조합으로 전달된다.
- Push-Pull 모드: P-MOS와 N-MOS가 번갈아 동작하며 High / Low를 직접 drive
- Open-Drain 모드: N-MOS만 동작하고 P-MOS는 꺼짐
핵심은 MUX다.MODER 레지스터를 통해 이 핀이 GPIO로 동작할지, UART / SPI 같은 Alternate Function으로 동작할지 선택한다.
AF(Alternate Function) 모드로 설정하면 MCU 내부 peripheral(USART, SPI, TIM 등)이 해당 핀을 직접 제어한다.
실습: User Button으로 LED 제어 (STM32F411 Nucleo)
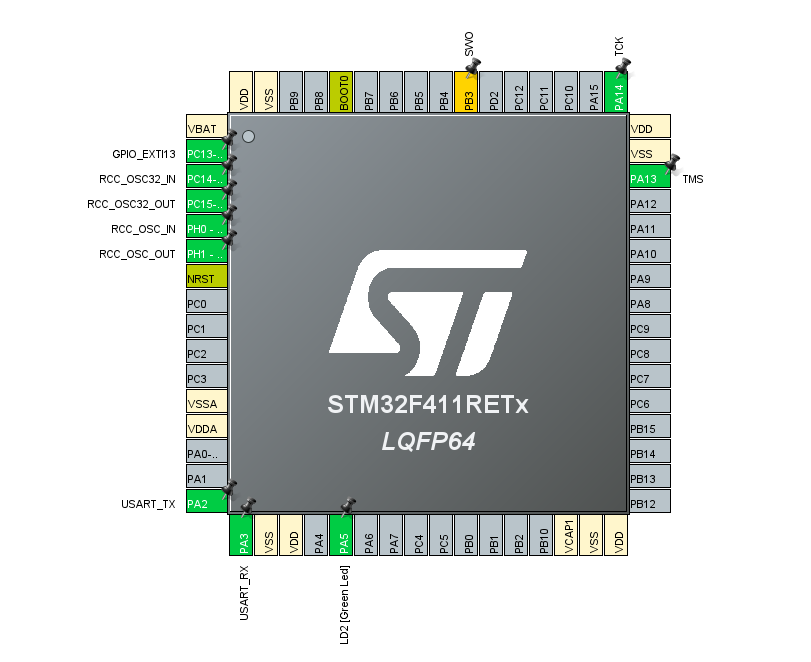
보드 기본 핀 정보
코드를 작성하기 전에 보드 회로도에서 먼저 확인해야 할 정보는 다음과 같다.
| 기능 | 핀 | 특이사항 |
|---|---|---|
| User LED (LD2) | PA5 | Active High |
| User Button (B1) | PC13 | Active Low, 보드 내부 Pull-up 연결 |
여기서 중요한 점은 버튼이 Active Low라는 것이다.
즉, 버튼을 누르지 않았을 때는 PC13 = High, 버튼을 눌렀을 때는 PC13 = Low가 된다.
따라서 코드에서 GPIO_PIN_RESET은 버튼이 눌린 상태를 의미한다.
 예시: STM32F411 Nucleo 보드에서 LD2와 B1의 위치를 표시한 사진
예시: STM32F411 Nucleo 보드에서 LD2와 B1의 위치를 표시한 사진
CubeMX 핀 설정
PA5→GPIO_OutputPC13→GPIO_Input
PC13의 Pull-up은 보드 하드웨어에 이미 연결되어 있으므로, CubeMX에서는 No pull로 두어도 된다.
 PA5를 출력, PC13을 입력으로 설정한 CubeMX 화면
PA5를 출력, PC13을 입력으로 설정한 CubeMX 화면
HAL 코드
동작은 단순하다.
- 버튼 상태를 읽고
- 눌려 있으면 LED를 켜고
- 아니면 LED를 끈다
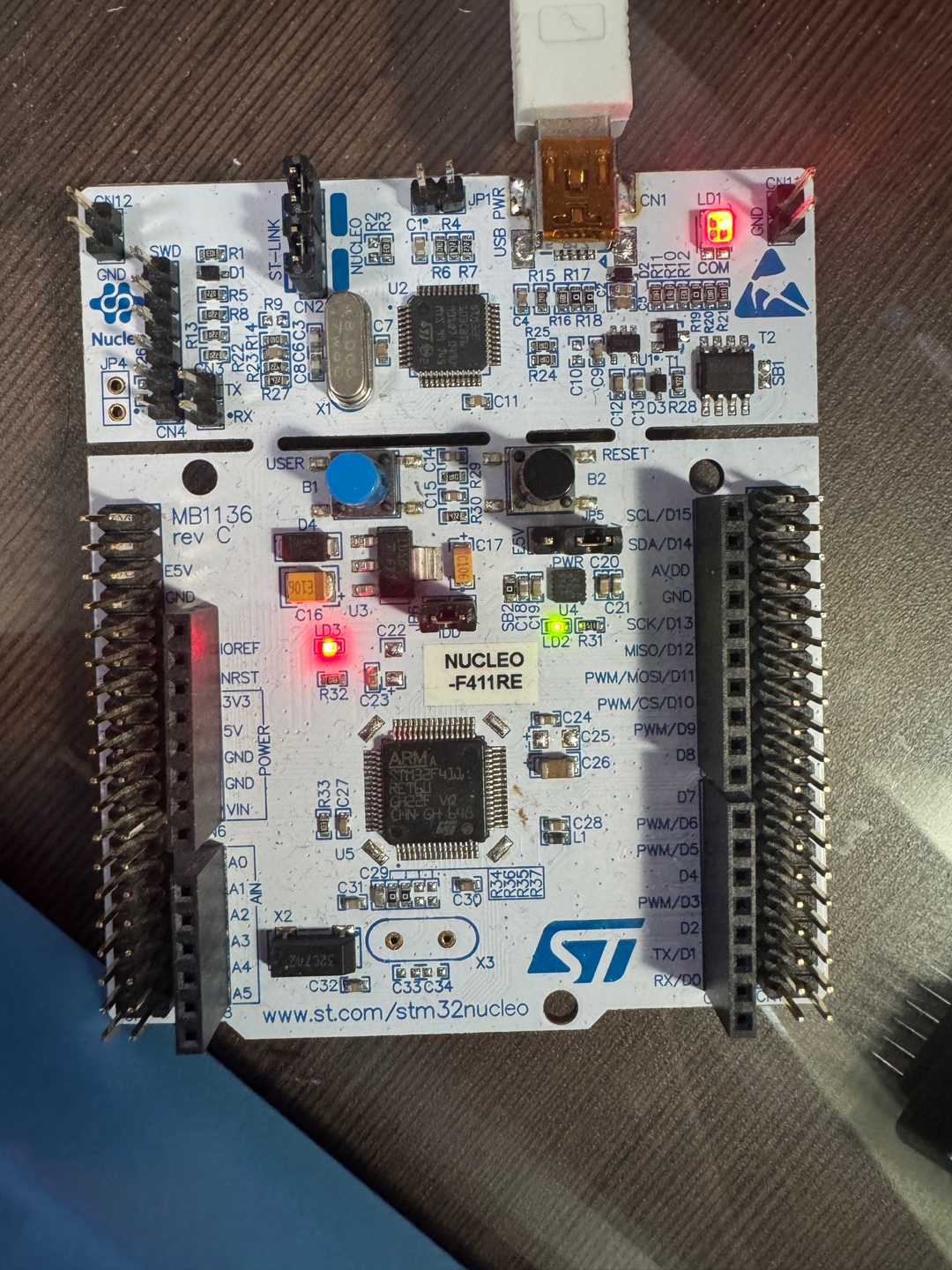 버튼을 누르면 LED가 켜지는 실행 결과
버튼을 누르면 LED가 켜지는 실행 결과
실행 결과
버튼을 누르고 있는 동안 LD2(초록 LED)가 켜지고, 버튼에서 손을 떼면 꺼진다.
이 정도의 간단한 실습에서는 debouncing을 따로 넣지 않았다.
버튼을 누르고 있는 동안 계속 켜는 구조라서 chattering이 큰 문제가 되지 않는다.
다만 버튼을 한 번 눌렀다 뗐을 때 상태가 토글되는 구조로 바꾸면 debouncing이 필요해진다.
추가 학습: OSPEEDR를 왜 설정할까?
출력 속도 설정은 slew rate(신호가 바뀌는 속도) 와 관련이 있다.
속도가 빠를수록 엣지가 가팔라지고, 그만큼 EMI 도 커질 수 있다.
그래서 고속 SPI 클럭처럼 빠른 신호가 필요한 경우에는 High Speed가 필요할 수 있지만,
단순한 LED 제어 같은 저속 신호에 Very High Speed를 쓰면 불필요한 noise만 증가시킬 수 있다.
핵심 키워드
- Floating
- Pull-up
- Pull-down
- Push-Pull
- Open-Drain
- Active Low
- Schmitt Trigger
- Slew Rate
- Debouncing
마무리
이번 글에서는 GPIO의 기본 개념과 입력/출력 구조, 그리고 STM32F411 Nucleo에서 버튼 입력과 LED 출력을 제어하는 간단한 실습까지 정리했다.
다음 글에서는 HAL_GPIO_ReadPin() 과 HAL_GPIO_WritePin() 이 실제로 내부에서 어떻게 동작하는지, 그리고 왜 ODR 대신 BSRR를 사용하는지까지 이어서 정리할 예정이다.